在距离地球数百乃至数万公里的太空中,大型空间可展开天线如同一把把缓缓张开的“巨伞”,肩负着通信、遥感、深空探测等重要使命。然而,在极端空间环境下,如何让这些“巨伞”长期保持精准的形态,却一直是航天领域面临的难题。

近日,西安电子科技大学机电工程学院/电子装备机电耦合国家级重点实验室杜敬利教授团队在该领域取得重要进展,围绕大型空间可展开网状反射面天线在轨环境下的型面精度保持需求,提出了一套融合分布式模型预测控制、动态子结构建模与高密度微型作动器驱动的型面主动调控技术体系,实现了柔性空间结构误差预测、约束处理与实时补偿的系统化解决方案。该研究成果以Distributedactivesurfacecompensationforlargespace-bornemeshreflectors为题,发表于机械领域国际顶级期刊InternationalJournalofMechanicalSciences。西安电子科技大学为通讯单位,博士研究生任志威为第一作者,杜敬利教授为通讯作者。
“可以把大型空间天线看作一个非常复杂的柔性结构,在太空环境中容易因温度变化、振动等因素发生形变,影响信号收发精度。”杜敬利教授解释道,“我们的目标就是为它装上‘智能神经’,让它能自主感知形变、协同调整,始终保持最佳形态。”
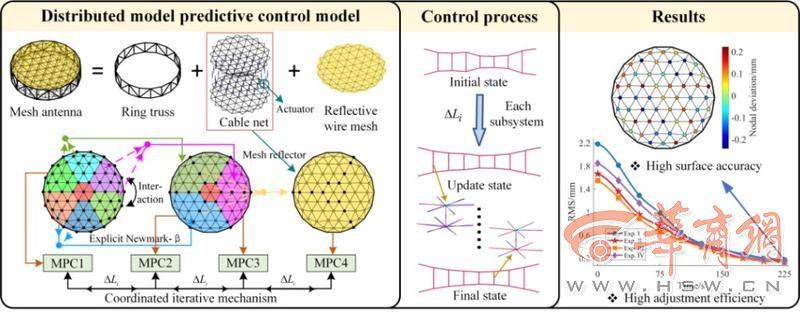
研究中,团队创新性地提出一种多层级动态子系统模型构建方法与分布式模型预测控制策略。通过将复杂的大口径柔性天线分解为若干可独立求解的局部子系统,并利用显式Newmark-β积分与动态子结构技术,原本庞大的结构动力学预测问题得以分布式处理,显著提升了实时控制的计算效率与并行性。各子控制器在本地预测的基础上,通过信息耦合与协调机制实现全局协同优化,为大规模作动器阵列的高效协调控制奠定了理论基础。
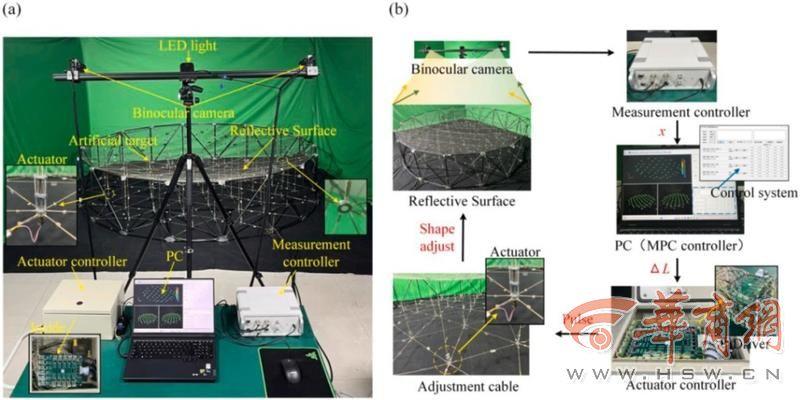
在实验验证中,团队搭建了一套3米口径网状反射面天线样机的闭环主动测控平台。该平台集成了自主研制的微型机电作动器阵列、动态测量系统与实时控制处理单元,可对反射面型面误差进行高精度感知与实时反馈。各子控制器根据局部误差信息,通过滚动优化策略协调驱动作动器阵列,实现型面误差的自适应补偿,完整形成了“感知-决策-执行”的闭环控制。

近年来,依托电子装备机电耦合国家级重点实验室,杜敬利教授团队在大型柔性天线型面感知、动力学分析与控制、机电耦合优化设计等方面持续攻关,已在ActaAstronautica、AerospaceScienceandTechnology、《机械工程学报》等国内外重要期刊发表系列成果。团队未来将围绕在轨型面实时感知、预测控制算法优化、作动器协同容错等方向继续深入研究,推动主动型面控制技术在下一代大型空间反射面天线中的工程化部署。
“这项研究不仅为空间天线型面控制提供了新思路,也对其他大型柔性航天结构的在轨调控具有借鉴意义。”杜敬利表示,“我们希望这些技术能早日应用于我国未来重大航天任务中,助力‘智慧太空’建设。”
华商报大风新闻记者任婷
来源:华商网-华商报
相关热词搜索:
编辑: 来源:
